Abstract
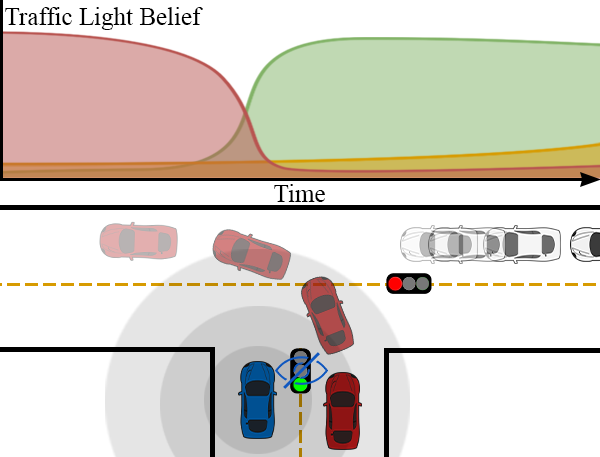
Autonomous systems often operate in environments where the behavior of multiple agents is coordinated by a shared global state. Reliable estimation of the global state is thus critical for successfully operating in a multi-agent setting. We introduce agent-aware state estimation—a framework for calculating indirect estimations of state given observations of the behavior of other agents in the environment. We also introduce transition-independent agent-aware state estimation—a tractable class of agent-aware state estimation—and show that it allows the speed of inference to scale linearly with the number of agents in the environment. As an example, we model traffic light classification in instances of complete loss of direct observation. By taking into account observations of vehicular behavior from multiple directions of traffic, our approach exhibits accuracy higher than that of existing traffic light-only HMM methods on a real-world autonomous vehicle dataset under a variety of simulated occlusion scenarios.
Shane Parr
PhD student
My research interests include model-based reinforcement learning, abstractions, and theory of mind.